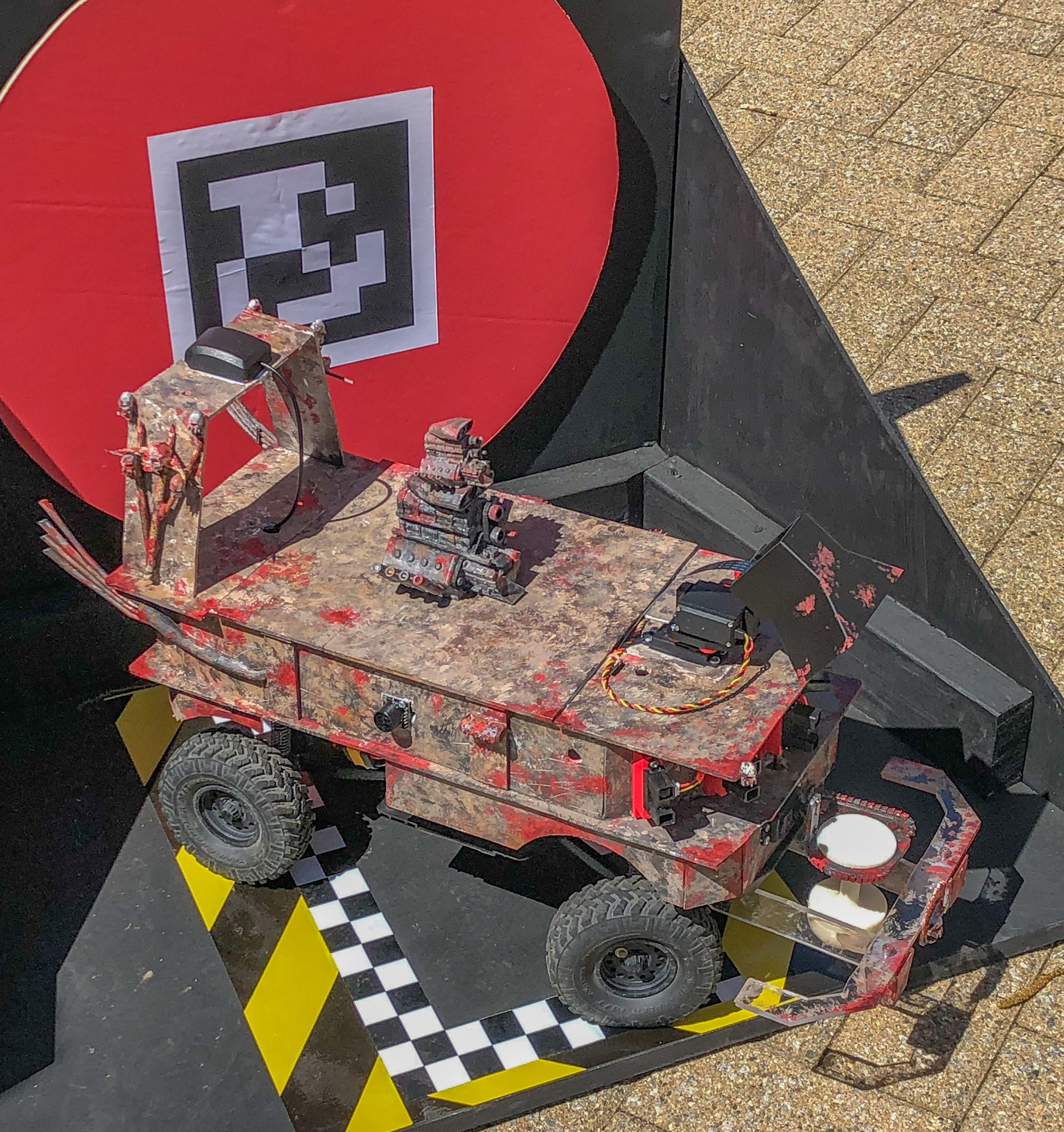
Maya (center) is pictured here with her robotics class teammates and their class project winning “Mars Rover” robot. Other teams used sonar and a wall following algorithm for navigation between target stations. Maya’s team opted to use down-facing computer vision (analyzing the herringbone brick pattern), which proved to be a more robust and efficient approach. Because she is living off-campus, this was the first time that she was able to meet with her team in person due to the Olin Covid safety protocol. For this reason, Maya was responsible for the robot’s software.